変換元の座標を(x,y,z)、変換後の座標を(X,Y,Z)とすると変換計算は以下になります。
X=ax+by+c
Y=-bx+ay+d
Z=z+(変換先の点の標高の平均-変換元の点の標高の平均)
a,b,c,dの値は指定した変換元と変換先の座標値から計算されます。
変換元と変換先の座標が2点の場合は、変換元の座標を変換した座標と、変換先の座標の差異は、XとYは0になります。
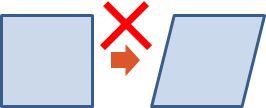
ヘルマート変換では四角形が歪むような変換はできません。(下図は2次元のイメージ)