リアルウォーカー連携
リアルウォーカー連携
GLOOBEのモデルデータからウォークスルーデータを作成して、ARCHITREND リアルウォーカーで高品質でリアルなウォークスルーを行います。
なお、ARCHITREND リアルウォーカーは、GLOOBEのオプションプログラムです。
リアルウォーカーでウォークスルーを行うM460410_rwk_sec01
- 3Dビューをアクティブにして、視点を調整します。
- 表示パレットで、表示させたくないデータをOFFにします。
 「リアルウォーカー連携」をクリックします。
「リアルウォーカー連携」をクリックします。- 部品光や背景の設定を確認します。
- 「実行」をクリックします。
リアルウォーカーが起動して、連携したデータが表示されます。
- リアルウォーカーの「ファイル」メニューから「名前を付けて保存」を選択して、データを保存します。
メモ
- ウォークスルーデータは、モデルデータ(.GLM)の管理フォルダ内の「リアルウォーカー」フォルダに保存されます。
- 保存されたウォークスルーデータを次回GLOOBEから開くには「ホーム」タブの
 「リアルウォーカー起動」を選択します。
「リアルウォーカー起動」を選択します。
ウォークスルーデータを作成するにはM460410_rwk_sec02
GLOOBEのウォークスルーデータを別のマシンにインストールされているリアルウォーカーで使用するには、「ファイル作成」でウォークスルーデータをファイル(.rwm)に保存し、そのファイルを別のマシンのリアルウォーカーで開きます。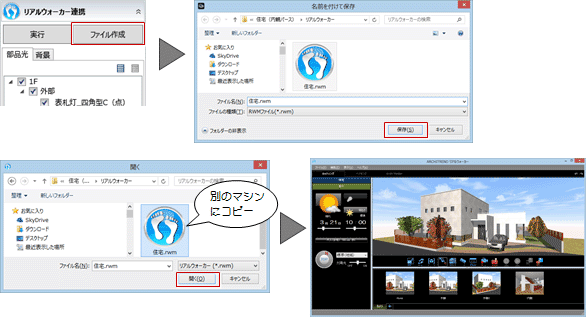
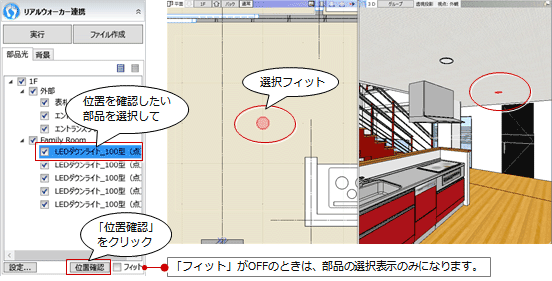
部品光源を設定するにはM460410_rwk_sec03
モデルデータに照明器具などの光源を持つカタログ部品を配置しておくと、リアルウォーカーでライティング状況をシミュレーションできます。
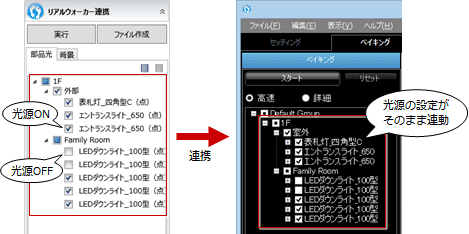
リアルウォーカーで点灯/消灯を切り替えたい照明は、あらかじめGLOOBEで部品光源をONにしておくと、リアルウォーカーにそのまま設定が連動し、ベイク処理後に照明の切り替えが可能になります。
(部品光源の設定については、「照明の光を調整するには」を参照)
メモ
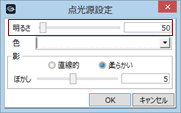
- 各光源の明るさは「設定」から開く「点光源設定」ダイアログで調整できます。点光源の設定のうち、リアルウォーカーのベイク処理で有効となるのは明るさのみです。
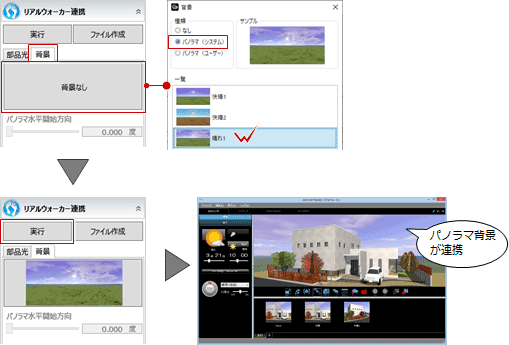
背景のパノラマ画像を連携するにはM460410_rwk_sec04
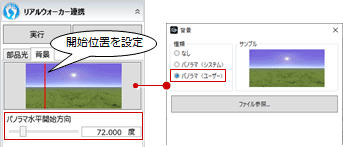
あらかじめGLOOBEで背景にパノラマ画像を設定しておくと、リアルウォーカーに連携します。
メモ
- プログラム固定の画像を使用するときは「パノラマ(システム)」、ファイルから選択するときは「パノラマ(ユーザー)」を選びます。「パノラマ(ユーザー)」の画像を設定した場合は、「パノラマ水平開始方向」で開始位置を設定します。