座標変換-点群位置合わせ
異なる点群データから対応する点を選択して位置合わせをおこないます。
異なる点群データから位置合わせをおこなう
異なる点群データから対応する点を選択して位置合わせをおこないます。
- [変換と計測]タブの
 [座標変換]-[点群位置合わせ]を選択します。
[座標変換]-[点群位置合わせ]を選択します。 - 変換方法(アフィン変換、ヘルマート変換、3Dヘルマート変換)を選択します。(次図:1)
- 変換元の点群、変換先の点群を選択します。(次図:2)
- [変換元の点を選択]を選択して、変換元の点の色を設定します。(次図:3)
- 変換元の点をクリックします。(次図:4,5,6,7)
変換元点名に指定した点の名称が表示されます。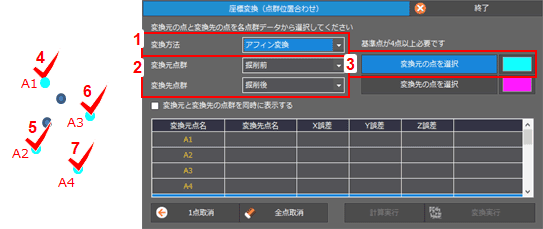
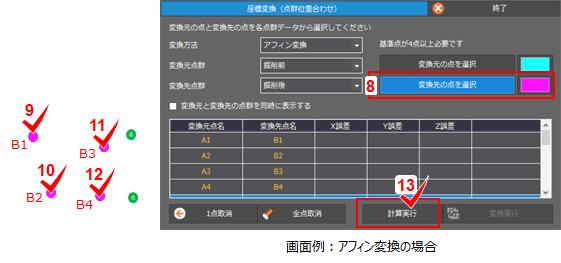
- [変換先の点を選択]を選択して、変換先の色を設定します。(次図:8)
- 変換先の点をクリックします。(次図:9,10,11,12)
変換先点名に指定した点の名称が表示されます。 - 必要に応じて4~7の操作を繰り返して、変換する基準の点を指定します。
アフィン変換の場合は、基準点が4点以上必要です。
ヘルマート変換の場合は、基準点が2点以上必要です。
3Dヘルマート変換の場合は、基準点が3点以上必要です。 - 指定を終了したら[計算実行]をクリックします。(次図:13)
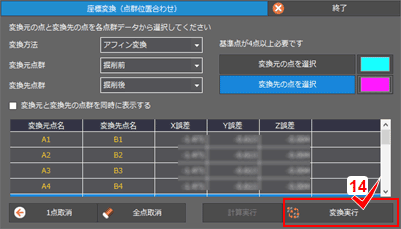
X誤差、Y誤差、Z誤差に「変換元の座標を変換した座標値」と「指定した変換先の座標値」の差が表示されます。 - 差が大きいときは、2~7の操作を繰り返して、計算をし直します。
- [変換実行]をクリックします。(次図:14)
注意
- [元に戻す]は実行できなくなります。
- 編集されたデータはすべてクリアされます。
- 非表示のデータも変換されます。